




歐姆龍PLC在河壩閘門控制系統中的應用
http://m.ydsygx.cn本文以某大型攔河壩閘門控制系統為例,主要介紹了基于PLC與現場總線控制方案的具體設計和實施細節要點。重點對系統的硬件、軟件結構及工作原理進行了講解,并且介紹了OMRON PLC的應用特征。實踐證明,該系統的投運能夠滿足大跨度水域攔河壩閘門的自動控制要求,具有先進、可靠、控制性能好等優點歐姆龍
1 前言
我國的水力資源在地域分布上極不平衡,總體來看,西部多、東部少,水力資源相對集中在西南地區,而經濟發達、能源需求量大的東部地區水力資源量極小,因此,西部水力資源開發除了西部電力市場自身需求以外,更重要的是要考慮東部市場,實行水電的"西電東送"戰略歐姆龍 但是在水力資源開發尤其是內河河壩控制系統方面,仍然普遍存在設備落后、功能差和老化嚴重等問題,相應的系統能耗大,效率低,且面臨技術改造和維修問題PLC 很多河壩的閘門控制系統設備落后,自動化水平低,甚至存在相當大比例的人工操作,效率低,亟需系統的升級改進以滿足更高更安全的控制需求PLC
作為通用工業控制計算機, 可編程控制器近40年來從無到有,其功能從弱到強,其應用領域從小到大PLC 今天的可編程控制器正在成為工業控制領域的主流控制設備,在世界各地發揮著越來越大的作用閘門 本文基于大型攔河壩閘門控制的具體情況,提出一個基于PLC和現場總線控制的整體設計方案閘門
該攔河壩由17孔啟閉式閘門組成閘門 其跨度約為300m,閘門的最大開度可達1.7m。閘門控制房距離大壩迎水面40m。由于地理跨度較大,本閘門控制系統采用總線分布式分級控制方式進行設計。
2 系統組成
系統采用總線分布式的控制方式,分為現場控制和集中控制兩級。總線采用OMRON公司的CompoBus/S現場總線協議,見圖1。
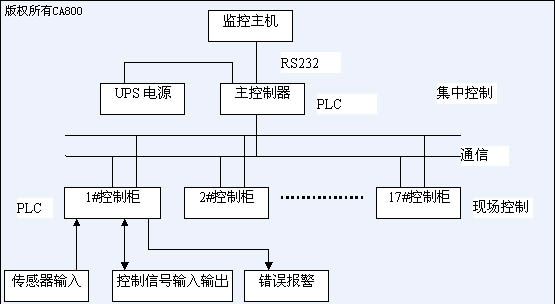
圖1 系統總體示意圖
現場級是由在每個閘門現場都安裝的閘門控制柜(CPU采用OMRON公司的CP1H系列PLC)組成,共17臺。其功能是實現在現場對閘門的手動控制,對水位、閘門開度、閘門運行狀態和錯誤信息的現場采集與監視,并且完成與集中控制級的實時通信,包括:接收控制信息,完成閘門控制動作,發送用于遠程監控的閘門運行狀態、錯誤信息到主站。
集中控制級是由設置于閘門控制房內的一個控制柜(CPU采用OMRON公司的CJ1G 系列PLC)。其主要功能是:通過CompoBus/S與下級系統進行通信,處理相關數據,向監控主機發送閘門的運行狀態、錯誤等信息以及接收監控主機的指令后向下轉發。
監控主機通過監控軟件(本系統采用的是組態王)接收并顯示閘門開度、狀態等信息,對錯誤信息進行報警,并且可以發出指令,控制閘門的運行,同時生成報表。UPS電源用來在停電時為兩級控制系統供電,保證系統不間斷工作。
3 系統配置及硬件接線
現場級單個閘門控制柜的輸入輸出點個數為:DI=16,DO=6,AI=2(第一孔)。本系統現場控制級CPU采用具有40個輸入輸出點的OMRON公司的CP1H系列PLC。由于一號控制柜將進行水位的采集,所以采用自帶有模擬輸入輸出模塊的CP1H—XA40D,此型號的PLC有4點的模擬量輸入,2點的模擬量輸出,其功能對于水位采集已經夠用。其余控制柜采用不帶模入/模出模塊的CP1H—X40D。通信是通過CP1H擴展的一塊通訊從單元SRT21完成,此通訊從單元節點號為O。根據PLC地址分配規則,輸入地址為ClO2,輸出地址為ClO102。
集中控制級的控制柜CPU采用了CJ1G 系列PLC擴展兩塊SRM21主站單元組成,其單元號分別為0和2。根據CJ1G的地址分配規則,其地址分別為CfO2O00與CfO202O。兩塊主站單元分別與下邊的8個和9個從站單元進行數據交換,并與監控主機進行通信。監控主機與CJ1G通過RS232線纜連接。兩級系統之間的通信采用的OMRON的現場總線協議CompoBus/S完成。
CompoBus/S通信模式可分為遠距離通信和高速通信兩種。當工作模式為遠距離通信模式時,傳輸速率為83.75Kbps,傳輸距離可達500m; 當為高速通信模式時,傳輸速率為750Kbps,傳輸距離為100m。通信模式通過I/O連接單元的DIP開關設定。本系統選擇遠距離通信模式。
由于集中控制級的實現比較簡單,這里只是介紹現場級控制柜PLC(第一孔)的接線圖與軟件實現。現場級控制柜的接線原理圖如圖2。
PLC 由UPS電源提供220VC 電源。PLC的0CH和1CH為輸入通道,100CH和101CH為輸出通道。其0CH通道的低8位I:0.00~I:0.07接旋轉編碼器,進行閘門開度狀態的采集。0CH通道高4位進行現場閘門控制操作以及系統其他一些狀態的采集。在1CH(輸入)通道中I:1.08進行現場/集中控制的選擇。I:1.09是為了清除錯誤報警位設立,當錯誤排出后,對I:1.09的輸入使得錯誤信息復位,系統可以運行。1CH后兩位提供了閘門運行的一種保護。
輸出通道100CH的輸出為閘門的控制信號以及提示、報警信息。圖中的IN1+、IN1一為模擬量輸入通道。它與水位儀連接。由于CP1H系列PLC提供了一個24VDC的電源輸出,所以可以直接作為水位儀的電源。
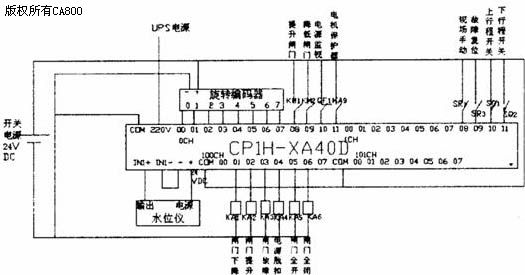
圖2 PLC現場接線原理圖
4 軟件設計
現場一號控制柜的軟件編寫如下:系統的自動控制功能可分為現場級控制、集中開/閉環控制。其控制的程序流程圖如圖3。現場控制級具有最高的優先級,這是由于對閘門的控制要求有較高的安全性和可靠性。當選擇現場級控制后,集中開/閉環控制都被屏蔽。PLC采集現場控制柜的升、降、停控制輸入狀態,對閘門進行升降停操作。此時閘門的開度信息、運行狀態可以在現地控制柜上的文本顯示屏進行顯示輸出,并同時上傳到監控主機顯示。如發生錯誤,則發出報警并停止閘門運行。
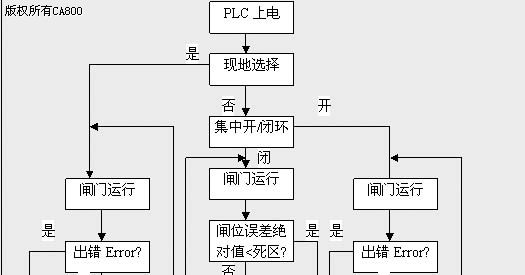
圖3 系統軟件控制流程圖
當W2.05復位時,進行集中開環控制。遠程開環控制可以在監控主機上點擊操作界面(本系統采用的是組態王)上的升、降、停按鈕,完成對閘門的遠程控制。當升、降、停按鈕被點擊時,主機會置位集中控制級PLC 的存儲位,并通過CompoBus/S總線將置位信息傳送給分散控制級PLC,其內存地址為W2.00、W2.01、W2.02。CP1H根據此三個開關量的狀態進行閘門操作。考慮到升、降、停的快速切換可能會導致出錯,所以要全都采用了互鎖。當有錯誤發生時不管閘門的運行在何種狀態都必須馬上停止閘門,并發出報警,直到錯誤排出后,通過CP1H的故障復位按鈕(CIO1.09)清除故障報警,并重新運行。
閘位的采集通過8位增量式旋轉編碼器輸入得到。其輸入通道為CIO0.00~CIO0.07。由于編碼器輸入的是格雷碼,所以需要采用格雷碼轉換指令(GRY)將其轉化為BIN(-進制化16進制)數據(存儲與D20)。由于編碼器的位數僅8位,因此還要對編碼器所轉過的圈數(D70)進行軟件的采集計算。最后根據編碼器的圈數D70和此時編碼器的值D20計算閘門的運行距離(D250)。其計算公式為:D250=D70*單圈高度+D20。其流程圖如圖4。
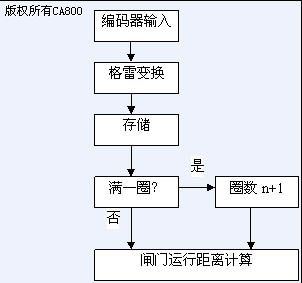
圖4 閘門開度采集子程序
系統水位采集時采用的水位傳感器是壓力式水位變送器,輸出信號是4~20mA電流信號。由于PLC 自帶有模擬信號輸入通道,使得標準電流信號可直接輸入PLC(本系統采用CIO200、CIO201分別為閘前、閘后水位輸入通道),不需要再擴展A/D模塊。模擬信號在PLC模擬輸入通道中自動完成A/D變換。這里的A/D變換全部采用的是線性變換,分辨率為1/6000或者1/12000,分辨率的選擇通過PLC設定。閘門運行時的錯誤信息主要包括:閘門卡滯,閘門運行失速, 以及閘門開度過大引起的上升越限和下降過度引起的下越陷等。這些錯誤信息的采集比較簡單,這里就不詳細介紹。
5 總結
系統自投運以來,取得了顯著的效益,體現在以下幾個方面:
(1)提高了設備的使用效率。本方案通過對閘門控制的綜合自動化,排除以往靠人工觀察和經驗進行操作,實現河壩閘門的優化運行,降低了主體設備的損壞率,延長其使用壽命和維護周期,每年節省備件消耗可達百萬元同時本方案采用了實時負荷控制,提高設備的利用率,減少了設備的空轉率,實現節能3%~5%。
(2)增強了可靠性和安全性。本設計方案實現了主體設備的聯鎖控制和異常報警和及時關停。工程師站設立授權以對有關參數進行修改,主控站以授權方式操作,避免了人為誤操作等可能造成的設備損壞,增強了系統運行的安全性、可靠性。
(3)減輕了職工的勞動強度自動控制 本設計方案實現集控室的遠程監視并相應進行相應操作即可,現場只需不定期巡視,減少了職工的所需數量和勞動強度,達到減員增效的目的自動控制